At the recent NVIDIA GTC 2026 conference, PICO and NVIDIA jointly launched
Isaac Teleop, an open-source immersive robot teleoperation solution. It is not a single-
point product, but a standardized framework designed to address the underlying data
challenges in the robotics industry.
Although the concept of Physical AI is drawing strong attention, the industry still
widely faces practical problems such as high training-data costs, severe system
fragmentation, and a disconnect between simulation and real-world environments.
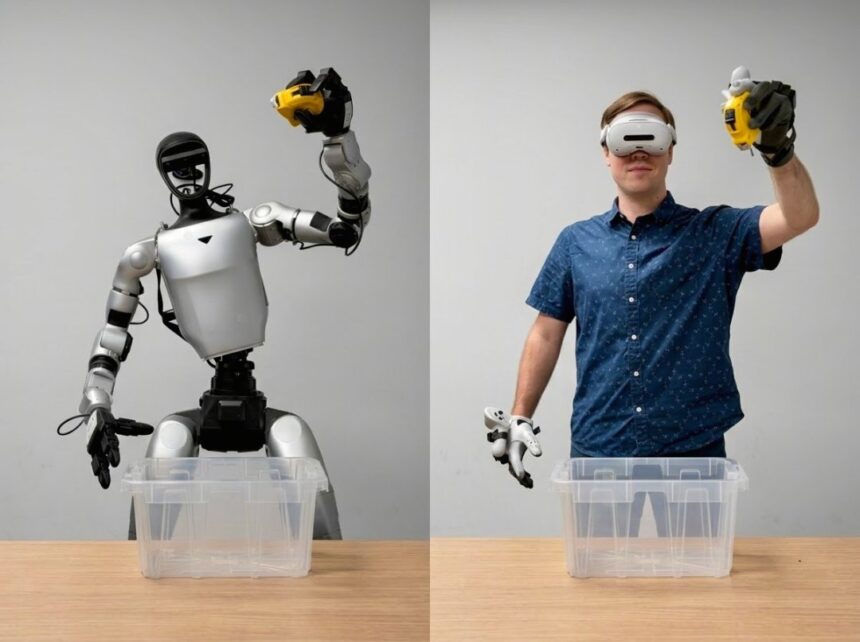
PICO and NVIDIA aim to solve this by using XR technology to create an operational
loop between humans and robots, turning data collection from specialized lab
equipment into a standard tool for developers.
Isaac Teleop uses a four-layer architecture. It provides a unified device interface,
enabling precise 6-DoF control with the PICO 4 Ultra, controllers, and motion
trackers. It also offers a unified runtime environment, allowing simulation code from
Isaac Lab to be used directly for controlling real robots through Isaac ROS. In
addition, it uses the first-person video recording function of PICO headsets to collect
training data, and the upcoming Ego4Robo feature will further simplify the process.
Cloud deployment is supported through Volcano Engine, which reduces enterprise
hardware barriers.
PICO already has experience in robotics. Its XRoboToolkit has served more than 100
robotics organizations and won the Best Paper Award at IEEE SII 2026. Through this
cooperation with NVIDIA, teleoperation is being expanded from a local tool to a
cloud-based ecosystem. The next-generation headset Project Swan will also be deeply
integrated with Isaac Teleop. The solution already supports PICO 4 Ultra and WebXR
access, and the toolchain is now open-source.
In the short term, it lowers the barrier to data collection. In the medium term, its
standardized format may enable data interoperability. In the long term, if Ego4Robo
matures, human operation videos may be converted directly into robot training data.
However, data bias caused by operator skill differences and latency in cloud
deployment still need to be verified in real applications. (Source: VRAR WORLD)